
In recent years, roboticists have developed a wide variety of robots with human-like capabilities. This includes robots with bodies that structurally resemble those of humans, also known as humanoid robots.
Testing the performance of humanoid robots can sometimes be challenging, as there are numerous measures to consider when trying to determine their applicability in real-world scenarios. Two features that are particularly important for humanoid robots are posture control and balance, as these robot’s body structures can sometimes make them prone to falling or stumbling, especially in complex environments.
Researchers at Technische Universität Berlin and the University Clinic of Freiburg recently created a system to evaluate the posture control and balance of both humans and humanoid robots. This system, presented in a paper pre-published on arXiv, is designed to assess balance and posture control of robots or humans as they perform different movements on a moving surface.
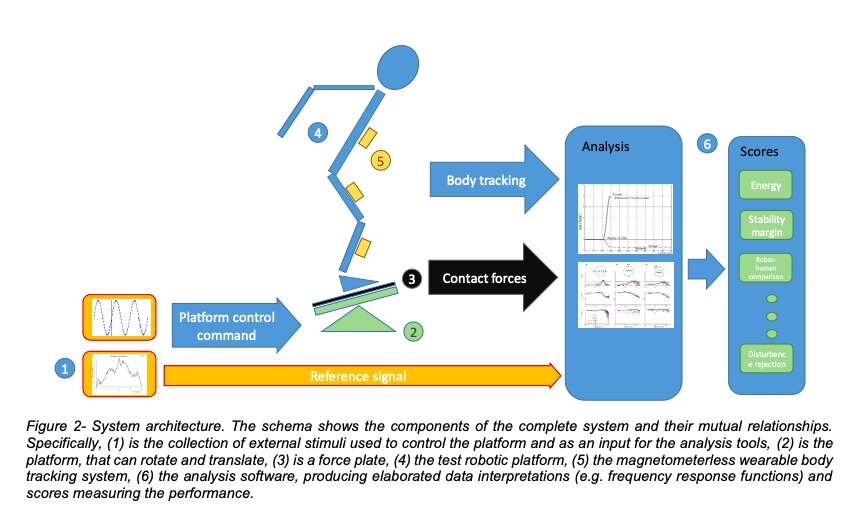
“The system includes a motion platform used to provide the perturbation, an innovative body-tracking system suitable for robots, humans and exoskeletons, control software and a set of predefined perturbations, a humanoid robot used to test algorithms, and analysis software providing state-of-the-art data analysis used to provide quantitative measures of performance,” the researchers wrote in their paper.
The evaluation system created by Vittorio Lippi, Thomas Mergner, Thomas Seel and Christoph Maurer has a modular design. This means that its components can be replaced or extended based on a researcher or roboticist’s needs.
“In order to provide versatility, the design of the system is oriented to modularity: all its components can be replaced or extended according to experimental needs, adding additional perturbation profiles, new evaluation principles, and alternative tracking systems,” the researchers explained in their paper.
The system created by Lippi and his colleagues can be used to evaluate a wide range of robots and exoskeletons, comparing their performance with that of humans. In addition, it can be used to conduct experiments assessing the balance and posture of human subjects.
To demonstrate its advantages and feasibility, Lippi and his colleagues used the system they created to evaluate the balance and posture control of a humanoid robot called Lucy, which is 1.5 m in height and weighs approximately 16.5 kgs. Their findings suggest that the new system could be a valuable tool for meeting the goal of the Eurobench project, which is aimed at devising standardized methods to test the performance of robots.
“The system developed for the Eurobench consortium will incorporate a testbed ready for posture control experiments, tested software routines for the analyses, and human datasets as a reference for comparison,” the researchers wrote in their paper. “The system is tailored to meet criteria that were developed in the past two decades to study human standing balance quantitatively, such that the user can refer to a standardized database of balancing performance.”
In the future, the new system devised by this team of researchers could allow roboticists to test the performance of humanoid robots more reliably, particularly their balance and posture control. In addition, it could be used by physicians or biology researchers to study or evaluate the balance and posture of humans.
The MIT humanoid robot: A dynamic robotic that can perform acrobatic behaviors
COMTEST Project: A complete modular test stand for human and humanoid posture control and balance. arXiv:2104.11935 [cs.RO]. arxiv.org/abs/2104.11935
© 2021 Science X Network
Citation:
A system to benchmark the posture control and balance of humanoid robots (2021, June 7)
retrieved 7 June 2021
from https://techxplore.com/news/2021-06-benchmark-posture-humanoid-robots.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Stay connected with us on social media platform for instant update click here to join our Twitter, & Facebook
We are now on Telegram. Click here to join our channel (@TechiUpdate) and stay updated with the latest Technology headlines.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.