Flexible skin patch provides haptic feedback from a human operator to a remotely operated robot
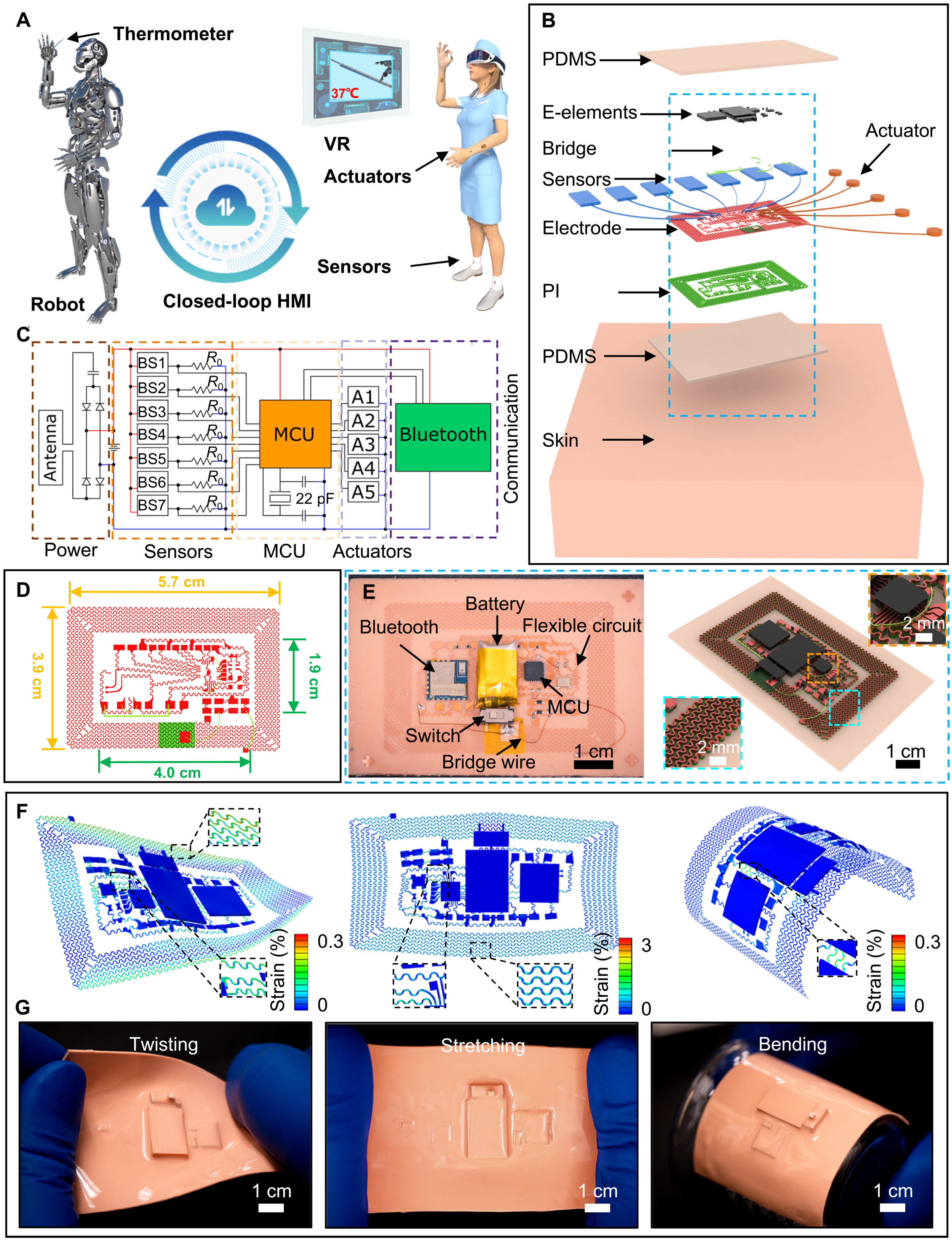
 A schematic illustration of the concept of robotic VR, where a nurse is wearing the CL-HMI to teleoperate a robot for reading a thermometer with virtual and haptic feedback. (B) Exploded view schematic illustration of the CL-HMI connecting with seven bending sensors (BSs) and five actuators. (C) Circuit diagram of the CL-HMI system. (D) Design of the flexible circuits in the CL-HMI. (E) Optical images and schematic illustration of the circuit design with enlarged views inset. (F and G) Finite element modeling (F) and optical images (G) of the CL-HMI in twisted, stretched, and bended configurations. Photo: Yiming Liu, Department of Biomedical Engineering, City University of Hong Kong. Credit: DOI: 10.1126/sciadv.abl6700")
A team of researchers from City University of Hong Kong, Dalian University of Technology, Tsinghua University and the University of Electronic Science and Technology of China has developed a flexible skin patch that can provide haptic feedback to and from a person and a robot, allowing for teleoperated robots. They have published their results in Science Advances.
Engineers have been developing robots that can be controlled remotely by a human operator, but, as the researchers note, most such systems are bulky and difficult to control. They also generally provide little feedback other than a video stream. In this new effort, the researchers in China sought to develop a more user-friendly system. To that end, they created what they call an electronic skin—a flexible skin patch that can be applied to the skin of a human controller that captures both movement and stress factors such as twisting and turning.
The patch has sensors for reading information from its own sensors, wireless transmitters to send the information it is receiving, and small, vibrating magnets that assist with haptic feedback. Groups of patches are placed on the skin of an operator at important junctures such as the fold on the front of the arm over the elbow. Some of the sensors in the patch consist of wires placed in a zigzag fashion, which are pulled straighter as the patch is bent, providing information about body movement—bending an arm at the elbow, for example, or releasing it.
All of the combined data from the patches allow an operator to control a remote robot without having to wear clumsy gear. But there is more to the system: The patches are also applied to parts of the robot to allow the operator to receive feedback. Putting patches on the robot’s fingertips, for example, would allow the operator to feel the hardness of an object held by the robot, courtesy of the tiny vibrating magnets.
Improved remote control of robots
Yiming Liu et al, Electronic skin as wireless human-machine interfaces for robotic VR, Science Advances (2022). DOI: 10.1126/sciadv.abl6700
© 2022 Science X Network
Citation:
Flexible skin patch provides haptic feedback from a human operator to a remotely operated robot (2022, January 18)
retrieved 18 January 2022
from https://techxplore.com/news/2022-01-flexible-skin-patch-haptic-feedback.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
Stay connected with us on social media platform for instant update click here to join our Twitter, & Facebook
We are now on Telegram. Click here to join our channel (@TechiUpdate) and stay updated with the latest Technology headlines.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.